目的
本研究では視覚と聴覚の2つの情報を利用し,効率よくロボットの行動を制御するこ
とを目指す.そのためにまず,ロボットに指示を与える人物(指示者)を効率よく探索
することを取り上げる.これは人間とロボットとの間で基本的でかつ重要なインタラ
クション「人が呼んだらロボットが振り向き,その人を認識し,その人のもとにやっ
てくる」という動作である.指示者はロボットに呼び掛け,手招きを行いロボットを
呼ぼうとし,ロボットはそれに反応して指示者を探索する.使用したロボットを図1
に示す.
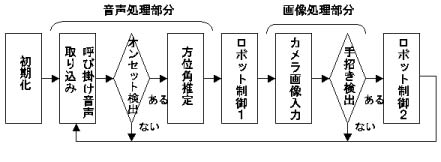
システム概要
図2に処理の概要を示す.音声処理部分ではロボットは呼び掛け音声の方向を推定
し,その方向に回転して指示者をロボット視野内に収める.音源定位にはマイクを4
つ使用し,2組の音の立ち上がり(オンセット)時間差によりロボットの周囲360°の範
囲で方向推定する.
指示者をロボット視野内に収めた後,画像処理部分ではロボットは
手招き動作の検出を行い,視野内の人物からさらに精度よく指示者を
特定,位置の把握をする.手招き動作検出にはフレーム間差分処理と
肌色抽出を使用し,手招き動作部分の方向を特定する.
結果・考察
以上のシステムを実装し,実験を行った.その結果,指示者探索において
良好な結果が得られた.手招き検出結果を図3に示す.
視覚だけに頼ったシステムの場合,ロボットが常に
その場で回転し指示者を探索する,指示者がわざわざロボットの視野内
に入っていくといった非効率的な行動が必要となる.
しかし本研究のシステムでは,より人間同士のコミュニケーションに近い
形でかつ効率的に指示者の探索,特定が可能であることが分かった.
|
|

|

|